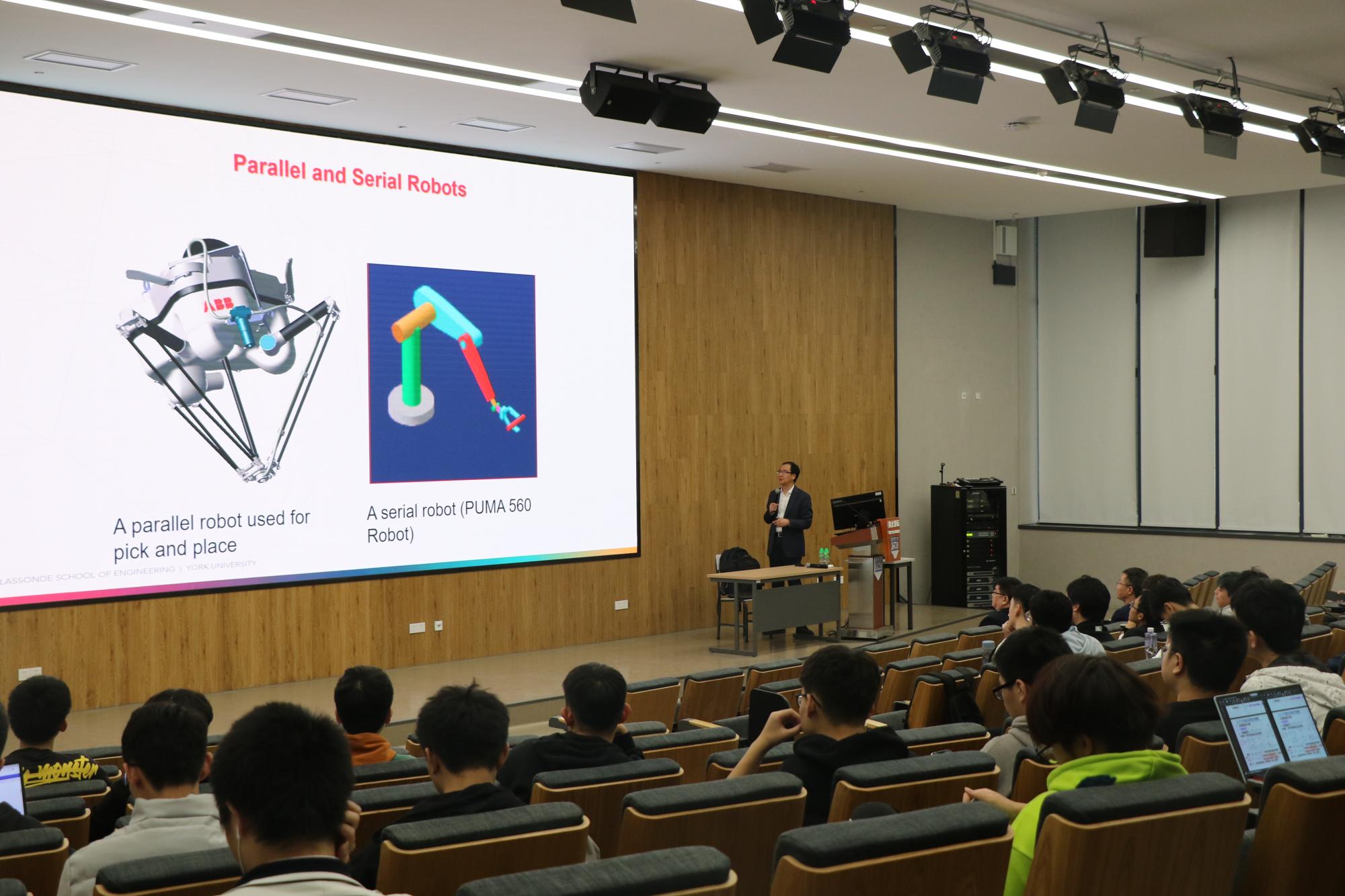
12月7日,加拿大工程院院士、约克大学张丹教授受邀来我校作以“智能制造业中机器人系统创新设计及应用”为主题的学术讲座。讲座在C-5公共教学楼109报告厅举行。讲座由中德智能制造学院院长张文伟教授主持,相关学院的教师和学生参加了本次活动。

本次讲座围绕“并联机器人、并联机器人串联化、并联机器人的前沿应用”几个方面展开。张丹教授循序渐进地从不同的角度讲述了对并联机器人的认识,分析了并联机器人在科技发展中的重要性。

张丹教授由浅入深讲述了并联机构的工作原理,分析了并联机器人的高刚度,高精度,强承载能力等优点,提出并联机器人在工业界应用的一些限制。张丹教授提出并联机器人创新设计,即把并联机器人串联化。比如如何改良并联机器人各个连杆之间的耦合关系,怎样将串联机器人转变为并联机器人,使并联机器人同时具备并联和串联机器人的优点等等。
张教授还展示了他在约克大学实验室的一些并联机器人方面的成果,包括可重构机器人、可重构模块化移动机器人、空中机械臂、并联机器人在外骨骼、康复机器人和救援机器人中的应用,尤其是在播放空中机械臂视频环节。空中机械臂是目前张教授团队的最新成果,无人机结合空中机械臂通过视觉感知周围环境、障碍物和目标物体,通过深度强化学习算法,学习飞行至目标位置,最终抓取物体,整个过程呈现出了满满的科技感和未来感。

报告结束后,参会教师和学生与张教授就相关研究问题进行了热烈的讨论。问题涉及机器人不同层面,包括并联机器人设计的创新思路、受力分析、计算机视觉、深度学习、传感器、以及机器人课程建设等多种问题。张教授以生动专业的语言一一进行了解答。师生们通过本次报告拓展了在机器人结构和应用方面的研究视野,提升了并联机器人更深层次的认识,并激发浓厚的研究兴趣。
张丹教授简介:
张丹,加拿大工程院院士,加拿大约克大学教授。张丹是国际上并联机器人与现代制造系统领域的国际领军人物,在新一代机器人系统设计和创新机构的构型综合等方面作出了极具影响力的科学贡献。他提出的全局刚度综合模型,是学术界公认的杰出成就,完美解决了动态高性能工业机器人系统中一些最具挑战性的难题,被应用于加工中心、医疗设备、微机电系统等多个场景。
张丹于2020年入选美国斯坦福大学发布的世界排名前2%顶尖科学家排行榜榜单。张丹是加拿大工程研究院院士,曾任约克大学机械工程系系主任,加拿大安大略省理工大学汽车、机械及制造工程系创系系主任,ASME Fellow以及CSME Fellow,并两度被授予“加拿大先进机器人及自动化领域研究主席”荣誉。在国际杂志发表论文218篇,国际会议论文182篇以及出版专著12部。
稿件来源:中德智能制造学院 张坛