2025年3月30-31日,第八届国际智能工业大会暨坪山区智能工业展在深圳坪山燕子湖国际会展中心举行。大会以“创新、融合、赋能、引领”为主题,组织“智能装备与智能制造”、“智能感知与信息化”、“智能数字化与软件”、“智能车联网”等版块的学术交流及产业化交流活动,涵盖多学科学术交流、产业化论坛及展览展示。

学校参展人员
深圳技术大学作为区内唯一一所高等院校受邀参加,共展出10项科技成果,成果涵盖智能网联汽车、智能机器人、半导体与集成电路、脑科学与类脑智能、智能传感器等行业领域。

坪山区副区长袁虎勇到展位参观
以下为部分参展成果简介:
一、微型管道测绘巡检无人机
目前的管道巡检任务通常还是采用人工巡检的方式,非常低效且危险。该无人机具有小巧灵活的机身结构,全包围防撞桨翼保护器,可自主飞行穿梭在狭窄的管道内进行例行巡检和三维建图,实现全自动化管道巡检,并回传位置与图像数据回到基站。该无人机不仅具备飞行运动能力,并且配备主动轮,可降落实现平面运动,适应复杂的管道环境,是一款陆空两栖复合式无人机。配合三维激光雷达与双目相机等多种传感器,使用边缘端算力进行传感器数据处理与算法决策,实现灵活避障与执行管道巡检任务。
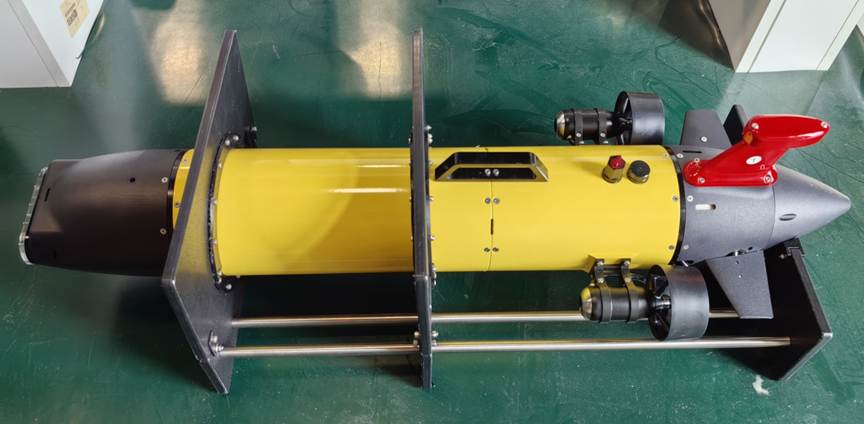
二、高机动小型自主式水下无人潜航器
该型水下潜航器(AUV)长度约为0.8米,能够在水下独立执行预设任务,不需要船只或人类操作员的实时控制,可以根据预先编写的路线自主航行,遇到障碍物自动规避,对路径进行实时规划。该型AUV采用双桨双舵布局,相比单桨布局AUV具有更好的机动性和操纵性,具有原地转弯,零速爬升等能力,使得该AUV能够在更加复杂的水下环境中运行。在AUV头部装有双目相机,使其具备水下视觉避障和智能监测的能力,体型小巧,便于单人携带布放回收,同时具有很好的拓展能力,具备安装USBL、DVL、侧扫声呐等声学任务模块的能力。
三、双主销差动转向系统及分布式驱动智能全向移动线控底盘
随着城市交通“微循环”梗阻加剧,传统车辆因机械转向架构缺陷,在狭窄场景下转向通过性不足。本平台针对新一代车辆高速稳定与机动灵活的需求,提出双主销转向构型,应对常规转向和大角度转向两种转向模式:常规模式下,转向轮关于倾斜主销转向,保障高速稳定;大转角模式下,转向轮关于直立主销转向,改善车轮倾角、降低车辆举升效应。相较于现有技术,该系统实现了小主销偏置距、大转向角、合理承力结构的共存;在实现左右车轮独立转向的前提下,能够保留左右车轮的机械联接,提高可靠性。在乘用车、商用车、特种救援车等车型底盘技术市场应用前景广阔。